



中国科学院合肥物质科学研究院强磁场科学中心坐落于安徽省合肥市风景秀丽的科学岛,2008年4月30日经中国科学院批准成立,依托中国科学院合肥物质科学研究院管理(科发人教字〔2008〕133号),其前身是2005年12月20日成立的“合肥强磁场科学技术研究中心”。中心目标:发展... 更多简介 +

稳态强磁场实验装置(Steady High Magnetic Field Facility,简称SHMFF)是国家发改委支持的“十一五”国家重大科技基础设施。SHMFF法人单位是中国科学院合肥物质科学研究院,共建单位是中国科学技术大学。各项任务以中国科学院强磁场科学中心为依托... 更多简介 +


2012年3月30日,由中科院合肥物质科学研究院吴仲城研究员等科研人员研制的仿人机器人集成化足部感知系统,顺利通过了科技部组织的专家验收。作为仿人机器人的“智能脚”,该系统具有实时同步获取行走时与地面接触的力量和区域、脚的倾斜度和变化速度等多种信息,实现了对复杂地面环境的一体化感知和识别。这标志着我国在集成化足部感知系统取得了突破性进展,打破了相关技术长期依赖于国外进口的局面。
双足稳定可靠行走是仿人机器进行作业的基本保障,也是仿人机器人实用的前提条件。科研人员针对仿人机器人足部信息获取与集成等关键问题,开展研究并解决了仿人机器人关键部件——仿人机器人足部设计、系统集成和信息获取与处理等关键技术,设计了具有多种感知能力的集成化机器人足,实现仿人机器人行走过程中有效稳定支撑区域、轨迹、地形、足底接触位置以及地面多维力等信息的实时同步获取,搭建了集成化足部感知和复杂地面反力动力学仿真系统。该系统在北京理工大学智能机器人研究所的BHR-2机器人平台上进行了实验,结果表明该系统较好地满足了实用化需求。
本课题得到国家自然科学基金、国家863计划等多个项目的资助。在研究过程中,相关研究成果获得多项自主知识产权,其中申请发明专利11项,软件著作权13项,发表论文20篇。
目前,该研究成果已形成了小批量设计和加工能力,对于进一步提升我国仿人机器人研究国际竞争能力,为促进仿人机器人理论研究、仿生控制技术及其产业化体系结构的创新提供了实验研究平台,同时也为智能人工假肢环境自适应感知和反馈控制提供关键技术和借鉴。
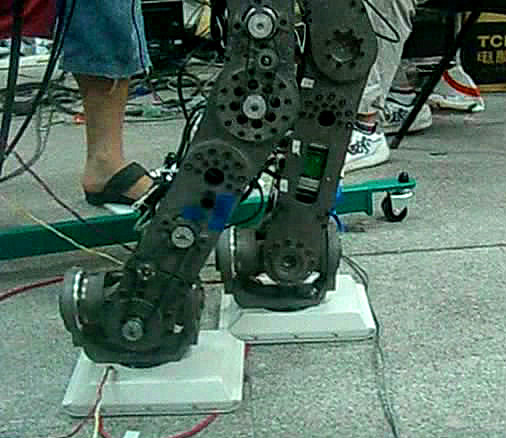
机器人行走实验

© 1996 - 强磁场科学中心 版权所有 皖ICP备05001008号-11
地址:安徽省合肥市蜀山湖路350号 邮编:230031 电话:0551-65591149 传真:0551-65591149 邮箱:chmfl@hmfl.ac.cn


















 表格下载
表格下载